
 Yahoo Noticias
Yahoo Noticias La exploración de las cuevas de la Luna: siguiente paso hacia una base humana estable
Sobre la superficie de la Luna podemos observar grandes planicies (los mares lunares, marias por su nombre en latín) y un casi incontable número de cráteres producidos por el impacto de meteoritos. Pero si miramos con más detalle se observan pequeños fosos de alrededor de 100 metros de diámetro. Sabíamos que estos fosos podrían ser, potencialmente, la entrada a tubos subterráneos formados por coladas de lava hace unos 4 000 años.
Gracias a imágenes de radar por satélite, se ha confirmado que uno de estos fosos conecta un tubo de lava. Han localizado una cueva en la Luna.
El descubrimiento, publicado en Nature, tiene una importancia tremenda, porque estos tubos subterráneos son candidatos ideales para albergar una base estable en la Luna.
Un techo que nos proteja y una temperatura confortable
Las cavidades subterráneas en la Luna pueden proteger la base tanto del bombardeo de micrometeoritos como de la radiación solar, que en nuestro satélite es unas 150 veces mayor que en la Tierra.
Además, son un lugar confortable para el ser humano. En 2022, la NASA, utilizando datos de la nave espacial Lunar Reconnaissance Orbiter (LRO) y modelos computacionales, encontró lugares sombreados dentro de fosos que siempre rondan una temperatura agradable de aproximadamente 17⁰ C, frente a las temperaturas de la superficie, mayores de 100⁰ C durante el día lunar y de menos de -150⁰ C durante la noche.
La cueva encontrada es accesible, pero la exploración presenta númerosos retos, más allá de los que ya supone llevar una misión al satélite de la Tierra.
Robots, pero ¿qué robots?
La misión de exploración de las cuevas de la Luna la llevará a cabo una flotilla de robots, pero ¿cómo van a descender por el foso? ¿Qué tipo de robots? ¿Con ruedas, con patas, tipo arácnido o con pequeños propulsores?
Estos robots lunares tendrán que sortear numerosos obstáculos rocosos, escanear tanto el foso como la cueva, obtener información científica y mandarla hacia la Tierra. El desafío es que tendrán que realizar estas tareas desde el interior del tubo de lava.
Que llegue la señal
Un equipo de investigadores de la Universidad de Oviedo y la Universidad de Vigo, con el apoyo de EOSOL, investigamos las comunicaciones en tubos de lava dentro del proyecto Antennas for Underground Communications (Antenas para la comunicación bajo tierra), financiado por la Agencia Espacial Europea (ESA).
Los modelos de propagación de señales de radiofrecuencia que desarrollamos predecían el alcance de la señal y la zona de cobertura dentro de una cueva. Estos modelos los validamos en una campaña de medidas en cuevas de lava análogas a las de la Luna; en concreto, en el tubo volcánico de La Corona y en el Monumento natural de la Cueva de Los Naturalistas, ambos situados en Lanzarote.

Robots en comunicación
El siguiente paso será trasladar estos modelos de comunicación a los robots, para que ellos mismos sean capaces de predecir la cobertura y puedan moverse, siempre conectados y coordinados con la flota de exploradores.
De hecho, es muy previsible que alguno de los robots de la flotilla actúe como repetidor de señales. Esto permitirá que se mantenga un enlace de comunicaciones robusto entre la superficie de la Luna y el interior de la cueva.
Gracias a estos modelos se ha analizado el posible sistema de comunicaciones que tendrá los futuros colonos, sus limitaciones y cómo optimizarlo en términos de peso y consumo de potencia, parámetros siempre importantes en cualquier misión espacial.
Una antena para la Luna
La antena desarrollada es capaz de mantener el enlace de comunicaciones independientemente de la orientación que tenga el robot. De esa manera, el robot tendrá libertad para moverse dentro del área de cobertura. Más aún, la antena se ha optimizado de manera que sus propiedades de transmisión y recepción no dependan del robot en el que esté embarcada.
Este dispositivo, además, está diseñado para soportar las vibraciones y otras situaciones de estrés de un futuro lanzamiento al espacio. También se ha comprobado su correcto funcionamiento en una cámara de vacío a diferentes temperaturas, para emular el ambiente lunar al que se tendrá que enfrentar.
Además, la antena está envuelta por una cubierta que la protege tanto de posibles golpes como del polvo lunar y se ha probado en diferentes posiciones en las cuevas de Lanzarote, tanto en interior como en el foso conocido como jameo en esta isla.
El siguiente paso será integrar la antena y el sistema de comunicaciones en el robot explorador, mejorar su comportamiento y reducir las limitaciones que aparezcan.
De dónde sacamos la energía
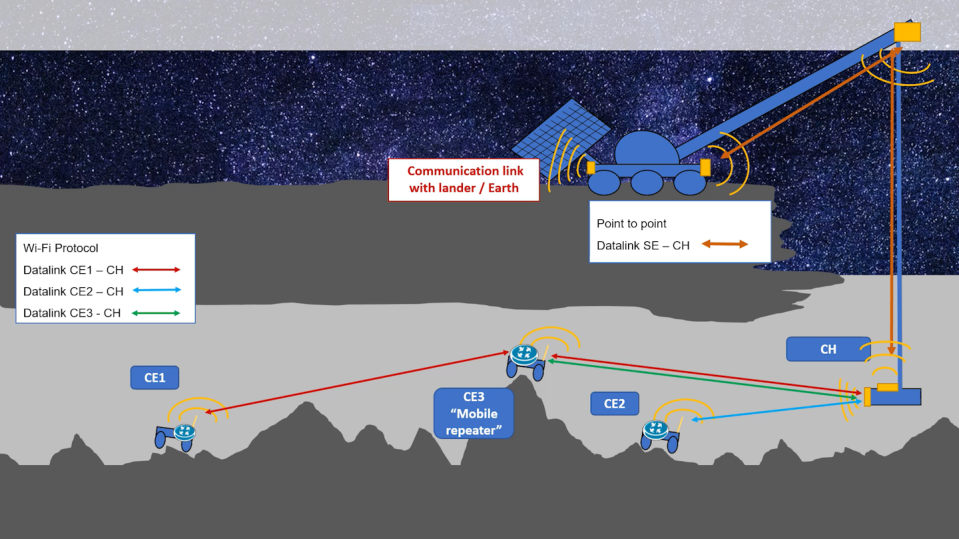
Desde la Universidad de Oviedo también diseñamos un sistema para desplegar un enjambre de pequeños robots en el interior de una cueva lunar, en colaboración con la Universidad de Vigo y Alén Space. El objetivo era superar la falta de luz solar y, por tanto, de energía solar, en el interior de una cueva, así como la forma de transmitir datos desde los robots a un rover en la superficie de la Luna.
La solución fue usar una grúa para bajar los robots a un tubo de lava. Equipado con un panel solar, el rover suministraría energía a los robots a través de la grúa utilizando un cabezal de carga conectado a la parte inferior de la grúa. Al estar a la vista de los robots, el cabezal de carga suministraría energía de forma inalámbrica, además de transmitir y recibir datos.
Y, a partir de ahí, a esperar el siguiente paso hacia una base lunar estable para los primeros colonos humanos.
Este artículo fue publicado originalmente en The Conversation, un sitio de noticias sin fines de lucro dedicado a compartir ideas de expertos académicos.
Lee mas:
Germán León recibe fondos de Agencia Espacial Europea, Ministerio de Ciencia, Innovación y Universidades, Consejería de Ciencia, Innovación y Universidad (Principado de Asturias).

